Contents¶
Open EII Sample UDFs¶
Open Edge Insights for Industrial (Open EII) supports loading and executing of native (C++) and python UDFs. In here, you can find the sample native and python UDFs (User Defined Functions) to be used with Open EII components like VideoIngestion and VideoAnalytics. The UDFs can modify the frame, drop the frame and generate meta-data from the frame.
Note
In this document, you will find labels of ‘Edge Insights for Industrial (EII)’ for filenames, paths, code snippets, and so on. Consider the references of EII as Open EII. This is due to the product name change of EII as Open EII.
User Defined Function (UDF)¶
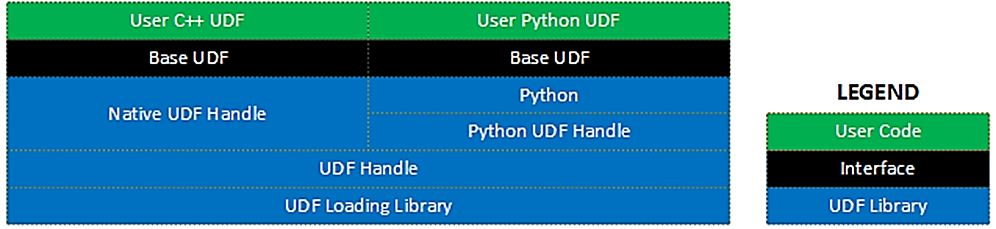
An UDF is a chunk of user code that acts as a filter, preprocessor, or classifier for a given data input coming from the Open EII. The User Defined Function (UDF) Loader Library provides a common API for loading C++ and Python UDFs.
The library itself is written in C++ and provides an abstraction layer for loading and calling UDFs. Additionally, the library defines a common interface inheritable by all UDFs (whether written in C++ or Python).
The overall block diagram for the library is shown in the following figure.
In this case, the VideoIngestion component is also able to execute the video data classifier algorithm by including the classifier UDF into the VideoIngestion configuration. By defining the Classifier UDF in the VideoIngestion component, the VideoAnalytics component become optional
UDF Configuration¶
Below is the JSON schema for UDF json object configuration:
{
"type": "object",
"additionalProperties": false,
"properties": {
"max_jobs": {
"description": "Number of queued UDF jobs",
"type": "integer",
"default": 20
},
"max_workers": {
"description": "Number of threads acting on queued jobs",
"type": "integer",
"default": 4
},
"udfs": {
"description": "Array of UDF config objects",
"type": "array",
"items": [
{
"description": "UDF config object",
"type": "object",
"properties": {
"type": {
"description": "UDF type",
"type": "string",
"enum": [
"native",
"python",
"raw_native"
]
},
"name": {
"description": "Unique UDF name",
"type": "string"
},
"device": {
"description": "Device on which inference occurs",
"type": "string",
"enum": [
"CPU",
"GPU",
"HDDL",
"MYRIAD"
]
}
},
"additionalProperties": true,
"required": [
"type",
"name"
]
}
]
}
}
}
One can use JSON validator tool for validating the UDF configuration object against the above schema.
Example UDF configuration:
{
"max_jobs": 20,
"max_workers": 4,
"udfs": [ {
"type": "native",
"name": "dummy"
},
{
"type": "python",
"name": "pcb.pcb_filter"
}]
}
UDF Writing Guide¶
User can refer to UDF Writing HOW-TO GUIDE for an detailed explanation of process to write an custom UDF.
Sample UDFs¶
Note
The UDF config of these go as json objects in the udfs key in
the overall UDF configuration object
Native UDFs¶
Dummy UDF
Accepts the frame and forwards the same without doing any processing. It’s a do-nothing UDF.
UDF config:{ "name": "dummy", "type": "native" }
Raw Dummy UDF
Accepts the Frame object and forwards the same without doing any processing. It’s a do-nothing UDF for working with multi-frame support.
UDF config:{ "name": "raw_dummy", "type": "raw_native" }
Note: raw_native udf type has been added to support multi-frame ingestion support.RealSense usecase requires multi-frame ingestion for color and depth frames.
Resize UDF
Accepts the frame, resizes it based on the
widthandheightparams.UDF config:{ "name": "resize", "type": "native", "width": 600, "height": 600 }
FPS UDF
FPS udf can be used to measure the total number of frames received every second. It can be used in VideoIngestion and VideoAnalytics application by adding the below configuration in the udf configuration. It can also be chained with other udfs in which case the FPS result will be affected depending on the other udfs used.
UDF config:{ "name": "fps", "type": "native" }
Config for chaining fps udf with other udfs:"udfs": [{ "name": "dummy", "type": "native" }, { "name": "fps", "type": "native" }]
Note The fps results will be logged in
DEBUGLOG_LEVEL, added to the metadata with the AppName as the key and will be displayed in the visualizer.Sample Realsense UDF
Accepts the color and depth frame, converts to rs2::frame type by using rs2::software_device simulation, enables a color filter on the depth frame using rs2::colorizer.
UDF config:{ "name": "sample_realsense", "type": "raw_native", }
Python UDFs¶
Note
Additional properties/keys other than name and type in the UDF
config are the parameters of the python UDF constructor
Dummy UDF
Accepts the frame and forwards the same without doing any processing. It’s a do-nothing UDF.
UDF config:{ "name": "dummy", "type": "python" }
Multi Frame Dummy UDF
Accepts the Frame object which is a list of frames and forwards the same without doing any processing. It’s a do-nothing UDF for working with multi-frame support.
UDF config:{ "name": "multi_frame_dummy", "type": "python" }
Note: When multi frame ingestion is used then the Frame object is a list of numpy frames else it is a single numpy frame. The udf type remains python for multi frame ingestion and single frame ingestion.
Jupyter Connector UDF
Accepts the frame and publishes it to the Open EII JupyterNotebook service which processes the frame and publishes it back to the jupyter_connector UDF.
UDF config:{ "name": "jupyter_connector", "type": "python" }
PCB Filter UDF
Accepts the frame and based on if
pcbboard is at the center in the frame or not, it forwards or drops the frame. It basically sends out only the key frames forward for further processing and not all frames it receives.UDF config:{ "name": "pcb.pcb_filter", "type": "python", "training_mode": "false", "scale_ratio": 4, "n_total_px": 300000, "n_left_px": 1000, "n_right_px": 1000 }
Refer python/pcb/README.md for more information.
PCB Classifier UDF
Accepts the frame, uses openvino inference engine APIs to determine whether it’s a
goodpcb with no defects orbadpcb with defects. Metadata associated with the frame is populated accordingly.UDF config:{ "name": "pcb.pcb_classifier", "type": "python", "device": "CPU", "ref_img": "common/video/udfs/python/pcb/ref/ref.png", "ref_config_roi": "common/video/udfs/python/pcb/ref/roi_2.json", "model_xml": "common/video/udfs/python/pcb/ref/model_2.xml", "model_bin": "common/video/udfs/python/pcb/ref/model_2.bin" }
Refer python/pcb/README.md for more information.
NOTE: The above config works for both “CPU” and “GPU” devices after setting appropriate
devicevalue. Please set the “device” value appropriately based on the device used for inferencing.Sample ONNX UDF
This UDF mainly demonstrates the model deployment on edge devices via AzureBridge service only.
Please follow the below steps:
Configure the sample ONNX UDF by following Sample ONNX UDF configuration guide
Follow Single-Node Azure IOT Edge Deployment to deploy the required modules
For more details on AzureBridge setup, please refer AzureBridge README.md
Construction of Metadata in UDF¶
If Open EII Visualizer/WebVisualizer clients are used for visualizing the classified frames, then please follow the metadata guidelines mentioned in **Metadata Structure** in Visualizer / WebVisualizer README respectively.
Note: User has to make sure that the data with in meta data should be of type list, tuple, dict or primitive data types (int, float, string or bool). Also, data with in list, tuple, dict must contain only primitive data types. Eg: Any data is of type “numpy.float” or “numpy.int” should be type-casted to float and int respectively.
Chaining of UDFs¶
One can chain multiple native/python UDFs in the udfs key. The way chaining
works here is the output of the UDF listed first would send the modified frame
and metadata to the subsequent UDF and so on. One such classic example is having
pcb.pcb_filter and pcb.pcb_classifier in VideoIngestion service config to
do both the pre-processing and the classification logic without the need of
VideoAnalytics service.
Combination of UDFs with ingestors¶
Ingestor |
Chaining UDFs for pcb demo usecase |
Chaining UDFs for worker safety gear usecase |
|---|---|---|
opencv/gstreamer |
|
|
gstreamer with GVA(Gstreamer Video Analytics) elements |
Not Applicable |
|
Note
Dummy UDF can also be used for above use cases for testing chaining UDFs feature but as such there is no value add as it’s a do-nothing UDF. In DEV Mode python udfs changes can be tested by restarting containers, no need to rebuild.